- More than just Object Detection
- estimate the object position, but also incorporate the position predicted by dynamics
- expectation of the object’s motion pattern
Challenges
- loss of 3D in 2D projection
- unusual poses
- occlusion , self occlusion
Simplifying the problem
- distinct a-priori colours (skin colour)
- multiple cameras
- prior knowledge - number of objects, object types, background
Tracking with Dynamics
Assumptions
- continuous motion patterns
- camera, gradual change/smooth trajectory
Dynamic Inference Model
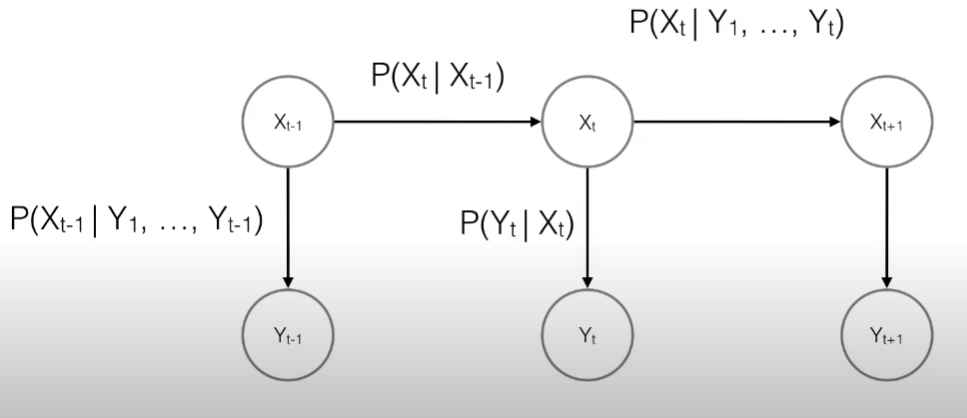
- x → estimated positions, y→ measured positions/ observations
- P(Xt | Xt-1) and P(Yt | Xt) are assumed to be some known distributions
- Gaussian Distribution is commonly used
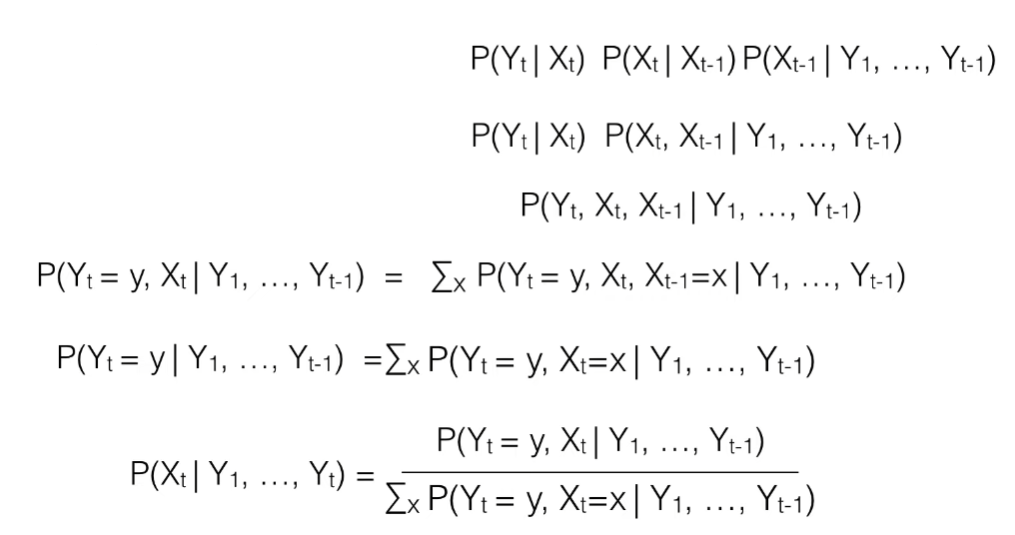
- Goal: Estimate P(Xt | Y1 … Yt)
- at any point t we have P(Xt-1 | Y1 … Yt-1)

- can be used instead to reduce computation cost
Algorithms
- Kalman Filter - parametric Bayesian filter
- Particle Filter - Non parametric Bayesian filter
Tracking by detection
- fixed camera scenarios
- limited background motion scenarios
Using Gaussian Mixture Models
- For each pixel
- compute pixel color histogram H using first N frames
- Normalize histogram H = H / ||H||
- Model H as a mixture of 3-5 gaussians
- for each subsequent frame
- pixel value X belongs to gaussian k for which
- ||X - μk|| is min and
- ||X - μk|| < 2.5σk
- pixels are background most of the time. So gaussians with large evidence/scale ω and small σ are background. if ω/σ is large classify as background else foreground
- pixel value X belongs to gaussian k for which
tip for optimizing: instead of fitting gaussians in every frame, check if the new image intensity histogram and the old one differs by a lot, if yes then fit gaussians else skip